Modular
Builders may omit some major end items and assemblies as required for their specific build requirements. Major end items can be attached or detached rather quickly from the cockpit.
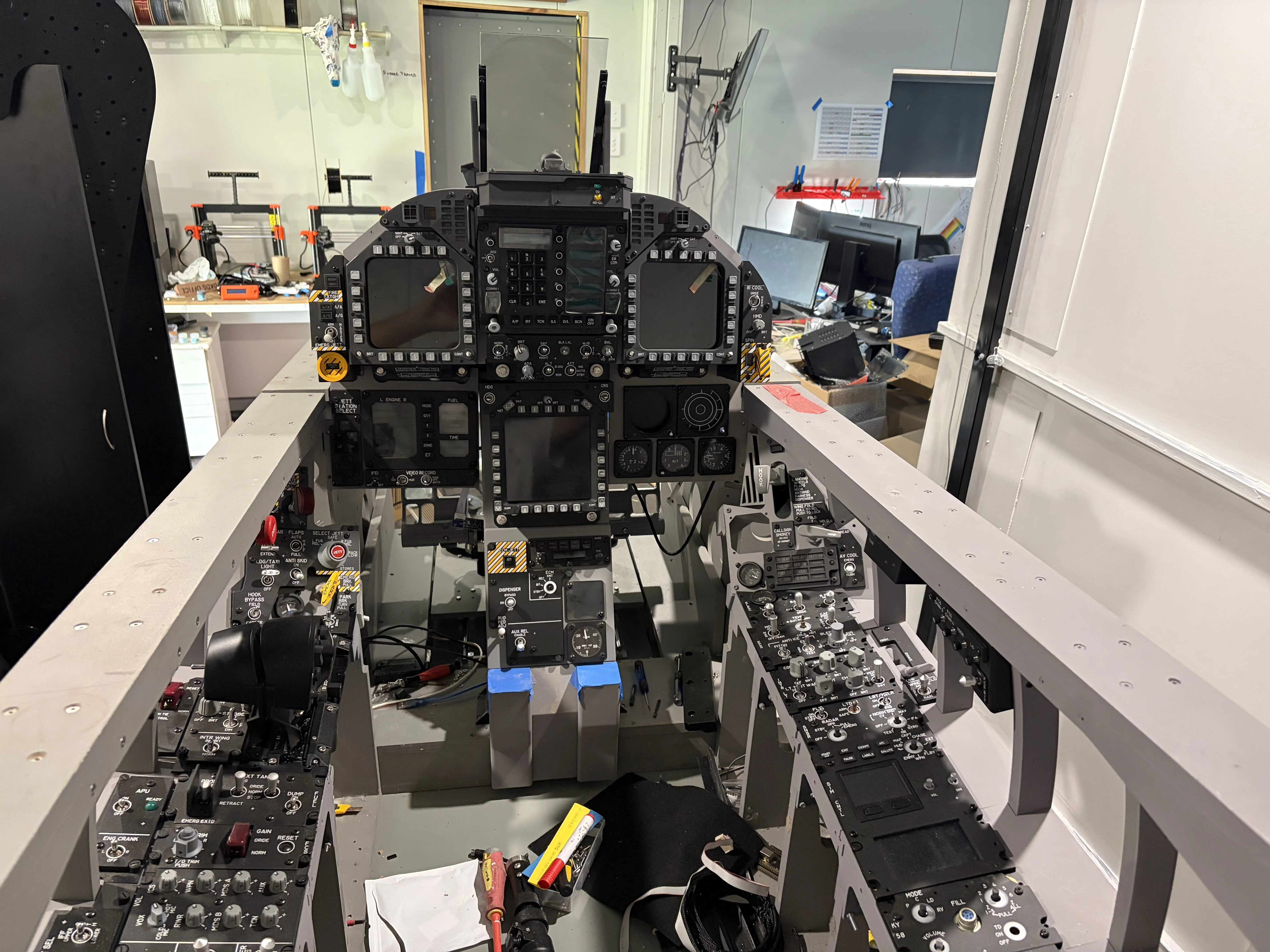
System overview
OpenHornet combines structure, panels, HOTAS, electronics, wiring, displays, and build documentation into a coherent simulator platform.
Simulator structure
The simulator structure is primarily MDF, with PETG printed console surfaces, threaded inserts, printed alignment brackets, and release drawings that guide repeatable manufacturing.

General features
OpenHornet is meant to be fabricated, moved, configured, and maintained by individual builders.
Builders may omit some major end items and assemblies as required for their specific build requirements. Major end items can be attached or detached rather quickly from the cockpit.
OpenHornet is designed to be built by you. It only requires moderate tooling such as a small hobby CNC router, FDM and resin 3D printers, an SMD rework or soldering station, and common hand tools.
Over 90% of the adult human male population has been accommodated, with a weight limit of 250 pounds / 113 kg.
The simulator is designed to provide easy access to all components for maintenance and troubleshooting.
All major end items can be detached from each other and fit through a standard residential interior door.
The OpenHornet simulator is designed with as small a footprint as possible.
71.25 in L x 40.5 in W x 45.69 in H
181 cm L x 103 cm W x 116.1 cm H
Panels typically combine clear acrylic backplates, acrylic light plates, and white-on-black legend plates to support cockpit readability and night lighting.
The stick uses a Thrustmaster grip while reproducing core geometry, travel, force gradients, breakout, and damping. The throttle is a replica assembly with detent work still under active development.
OpenHornet electronics are built around the Arduino Based Simulator Interface System, USB connections, master/slave RS-485 buses, and 12V, 5V, and 3.3V power buses.
DDI, AMPCD, IFEI, SARI, RWR, and other display choices should be taken from the build package drawings and relevant assembly documentation.
Software work lives in the OpenHornet-Software repository. The project currently points builders to the DCS-Skunkworks branch of DCS-BIOS.
Planned work
These are carried forward as project direction, not promises for a specific release date.
Embedded software for system microcontrollers and continued DCS integration.
Autothrottle enhancement, rudder pedals, canopy jettison, and additional cockpit mechanisms.
Canopy bow details, cockpit lighting, HUD/AoA indicator work, and type B panels.
Builder caution
Raw models and working branches may be useful for reference, but stable release files are the baseline for manufacturing decisions. Material substitutions and unsupported part swaps are at the builder's risk.